定义、术语和存储
定义、术语和存储
定义和术语
与树一样,我们要先介绍一下图的相关定义和术语
显然对于任意的图来说,顶点(Vertex) 和 边(Edge) 都是最基础的组成要素。如果边有方向(即A->B不能推出B->A),我们称为有向图(Digraph)。反之如果边没有方向,则称为无向图(Undigraph)。实际上我们可以把无向图看成一种特殊的有向图,即每条无向边都是两条有向边的组合。
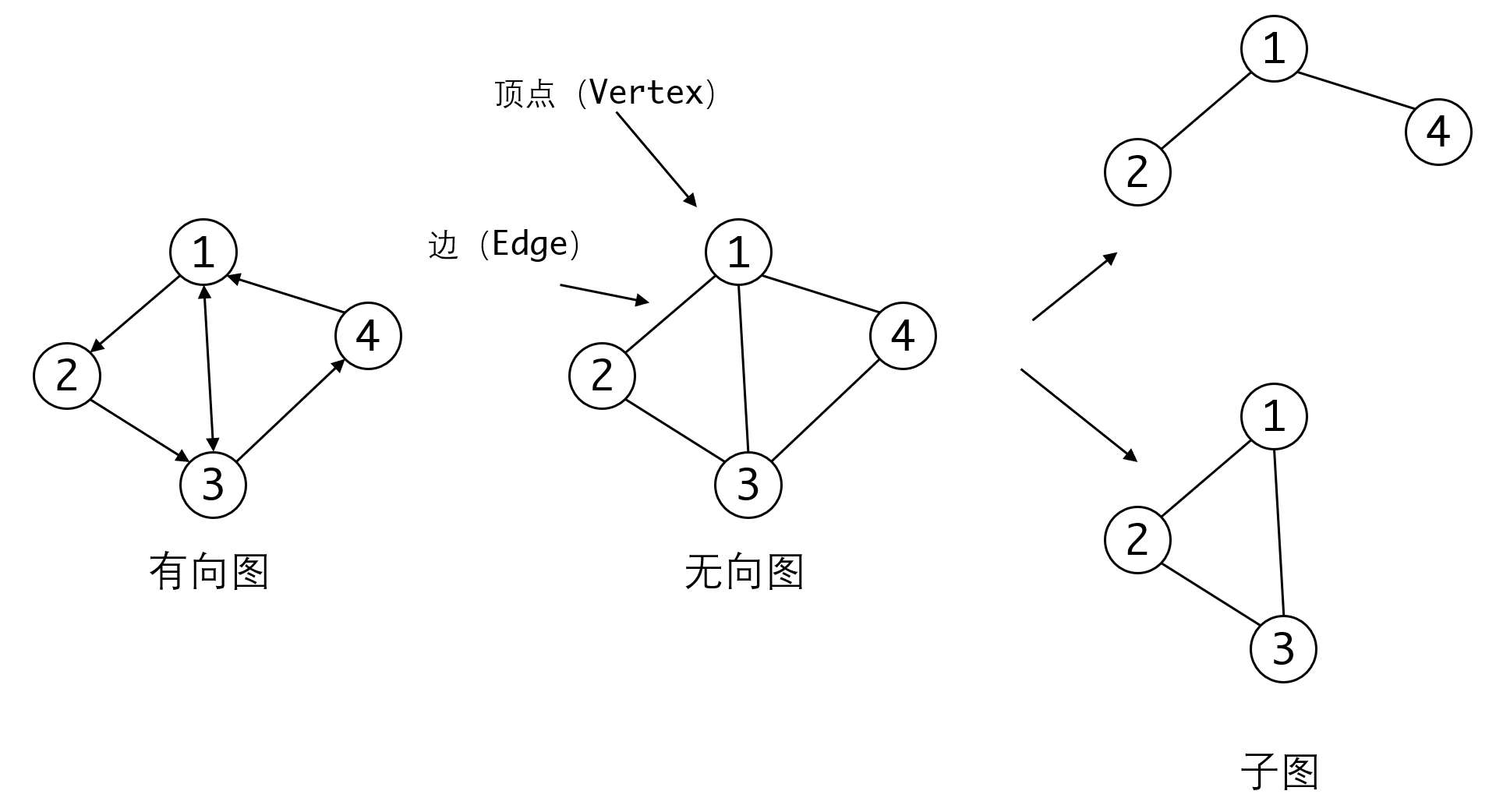
如果我们取出图的其中一部分顶点和边,那么构成的新图称为旧图的子图(Subgraph)。
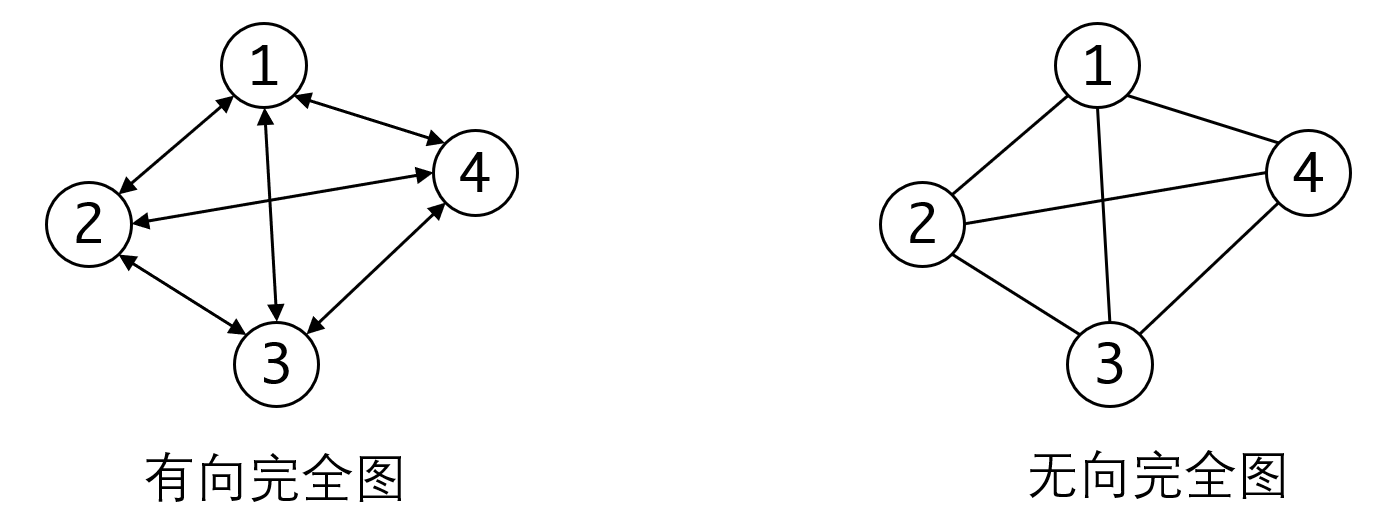
在此基础上,和树一样,我们会考虑,给N个顶点,最多可以有几条边?这个问题对有向图和无向图的回答是不同的。对于无向图来说,由于同一对顶点之间只能有一条边,所以这个数字是:。对于有向图来说,一对顶点之间可以有两条方向不同的边,所以这个值是。我们称这种边达到最多的图为完全图(Complete Graph),他可以分为有向完全图和无向完全图两种。
如果一个图的顶点多,而边少,我们称这种图为稀疏图(Sparse Graph),反之如果边多而顶点少,称为稠密图(Dense Graph) 。稀疏和稠密是一个比较模糊的概念,并没有一定的边界。
有些时候我们会赋予图的边一些属性,最典型的比如路径的长,用来衡量两个顶点之间的距离。我们把这种属性称为边的权(Weight)。把这种图称为带权图(Weighted Graph),或者网络(Network)。
如果顶点A有一条边可以到达顶点B,我们说B是A的邻接顶点(Adjacent)。从某个顶点出发的边的数目称为出度(Outdegree),反之进入某个顶点的边的数目称为入度(Indegree)。显然无向图的出度等于入度,可以简单用 度(Degree) 来称呼。
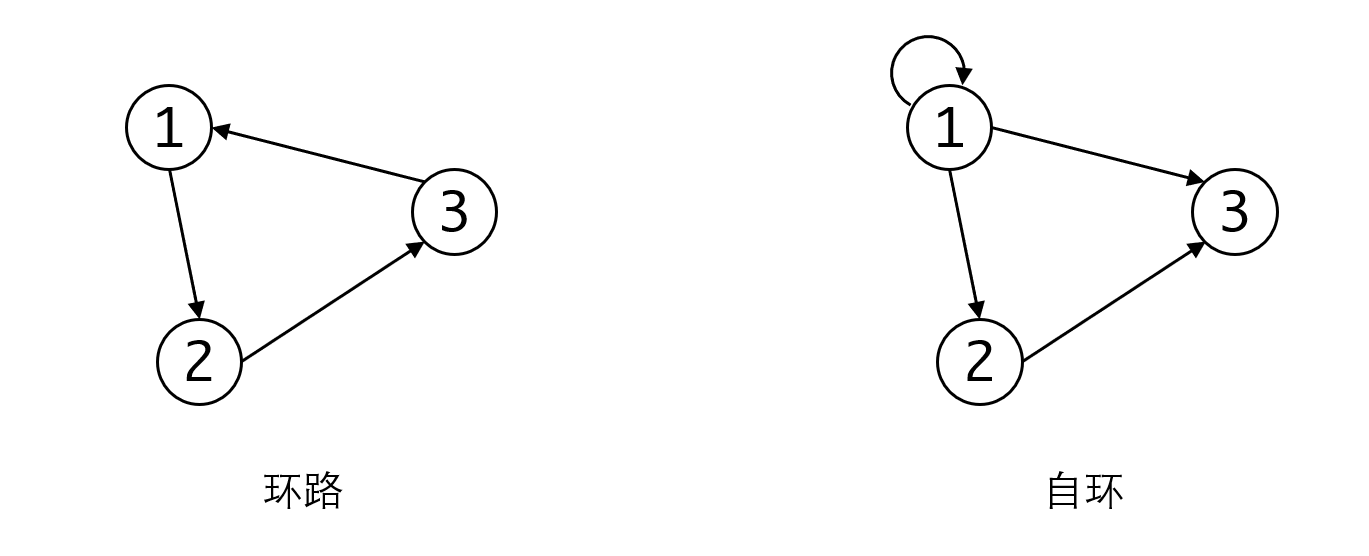
如果从某个顶点出发,能够回到自身,我们称这条能够回到自身的路径为环(Cycle)。有无环路一般在有向图上比较有意义,我们会称这种无环的有向图为有向无环图(Directed Acycli Graph)。而如果一个顶点存在指向自己的路径,我们称这种情况为自环(Self Loop)。注意环和自环的区别:
如果一个无向图的任意两个顶点之间都可达,我们把这种图称为连通图(Connected Graph)。同时我们称非连通图的极大连通子图为连通分量(Connected Component)。连通分量这个概念可能不是很清晰,你可以这么理解,他要满足两个条件:
- 子图本身是连通图。
- 子图和子图以外的其他顶点都不连通。

对于有向图来说,如果两个顶点可以相互到达。我们称这个有向图为强连通图(Strongly Connected Graph)。强连通图要求要双向可达,因为有向图中可以到达,并不能推出可以到达,无向图则没有这个烦恼。同理我们也称非强连通图的极大强连通子图为强连通分量。
图的概念是有点多的,相对于树几乎可以说多了一个数量级。不过大多数的概念名称都很直观。大家要注意理解。
图的存储
图的逻辑结构是我们目前学过的数据结构中最复杂的一种,与之相对的他的存储也是最复杂的一种。不过和我们目前学过的所有数据结构一样,图也既可以用物理上顺序的方式来存储,也可以用链式的方式存储,分别对应邻接矩阵和邻接表。邻接表中又根据组织的形式不同,可以分成邻接表,逆邻接表,十字链表和邻接多重表。
邻接矩阵
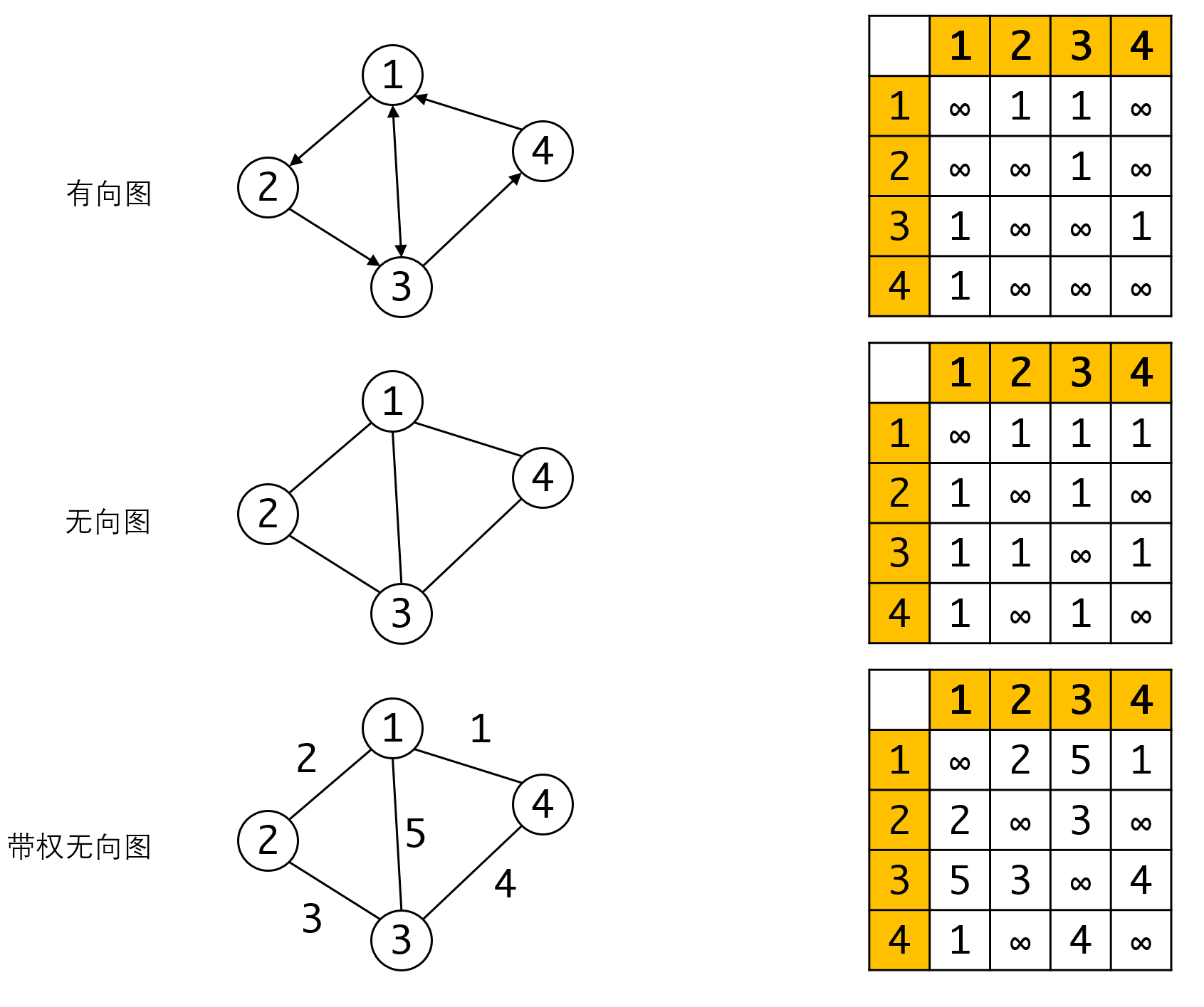
邻接矩阵的表示方式比树的顺序表示方法还要更简单一些。我们用一个二维数组来记录顶点和顶点之间的关系。如果从顶点有到的边相连,那么我们就对数组的第行,第列(a[i][j])赋值1。而无边相连的顶点,我们就赋值无穷大(可以人为设置一个标志)。
实际上我们是用对应的位置是否为1来记录边。如果需要表示带权图,我们就可以在对应的位置填入边的权值。
思考一下
在邻接矩阵里,要如何求顶点的度,包括入度和出度呢?
注意图中有向图和无向图邻接矩阵的不同,我们可以很容易发现无向图(不管带不带权)的邻接矩阵都是以对角线对称的。 这非常容易理解,无向图中,到有边,也就意味着到有变,所以数字总是成对的出现。 而有向图则没有这个性质。
对于无向图的这个性质,我们可以对无向图的邻接矩阵进行压缩,只记录上(下)半个三角形的内容即可,这样可以节省存储的空间。
能节省多少空间?
无向图如果只记录一半的矩阵内容,可以节省多少空间?是一半吗? 你准备怎么设计?
邻接矩阵的形式非常直观,很容易理解,处理和访问也很容易。但和树的顺序表示法一样,他最大的问题是空间利用率不高,大多数的空间都被无效数据填充了。对于稀疏图,这点就更为致命。
邻接表和逆邻接表
链式存储可以大大提高空间利用率。邻接表的基本原则是,通过顶点上的链表,来表示从顶点出发的边。
我们需要定义两种结构体,分别对应顶点和边:
struct Vertex;
struct Edge{
Vertex* end;
int value;
Edge* next;
};
struct Vertex{
int value;
Edge* edges;
}
所有顶点用顺序表(数组)的形式保存,再由这些顶点的edges域来记录边的信息。
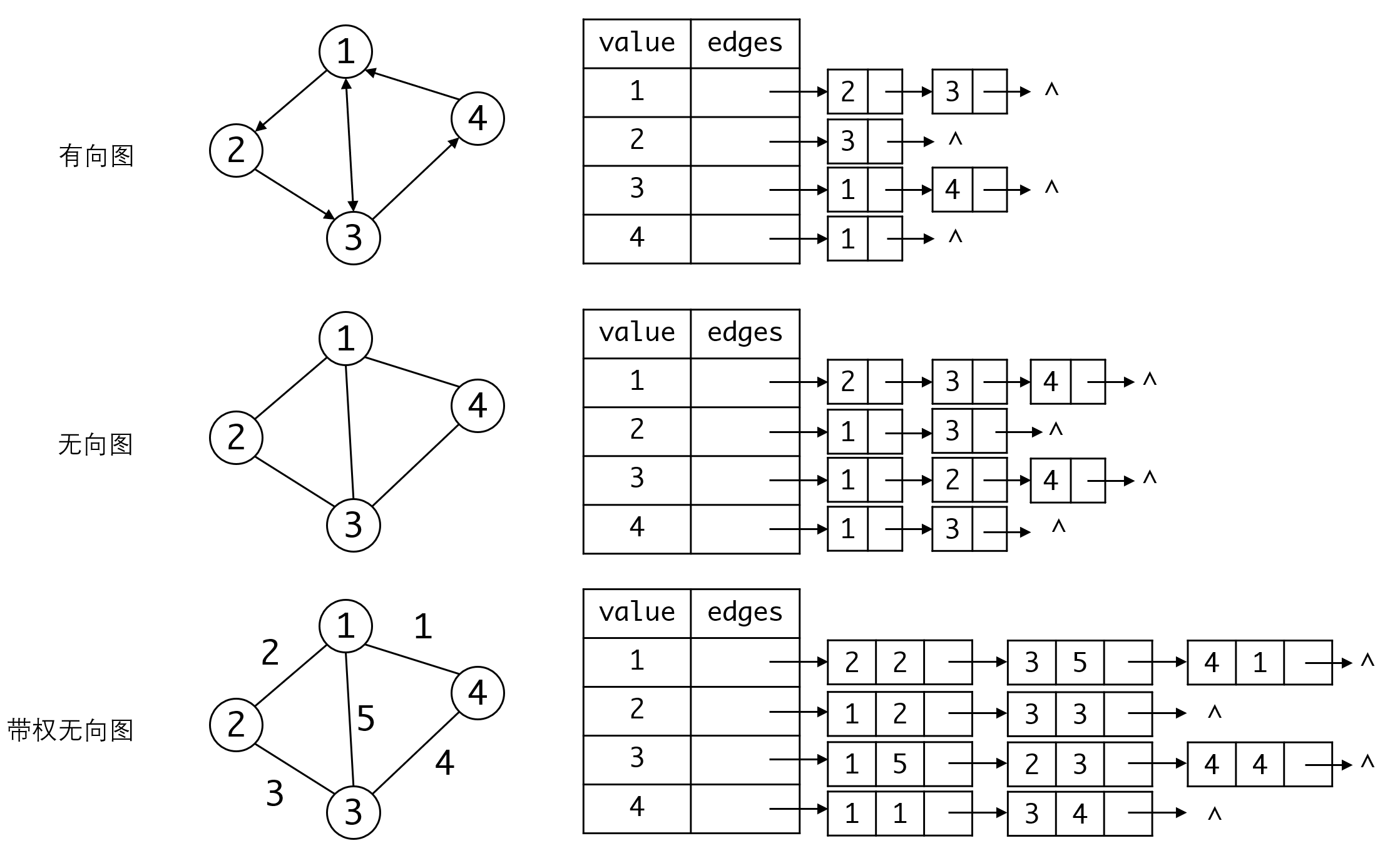
注意边里面虽然填入的是顶点的值,但实际上是顶点对象的数组下标或者指针,这样可以通过边很容易地找到对应的顶点。
当边上需要包含存储一定信息时(例如权重),我们可以用边结构体的value域,否则可以不使用。
从图中我们可以看出,对于无向图,顶点邻接表的数目就是其度。对于有向图,则是顶点的出度。但对于有向图的入度,则没有好的办法。实际上对有向图来说,可以很容易找到顶点的邻接顶点,也就是从该顶点出去的边的终点。但要知道从哪些顶点出发可以到达该顶点则比较麻烦。
思考一下
这两个操作的复杂度分别是多少?
- 有向图顶点的出度
- 有向图顶点的出度
为此我们需要引入逆邻接表,顾名思义逆邻接表记录的是以顶点为终点的边:
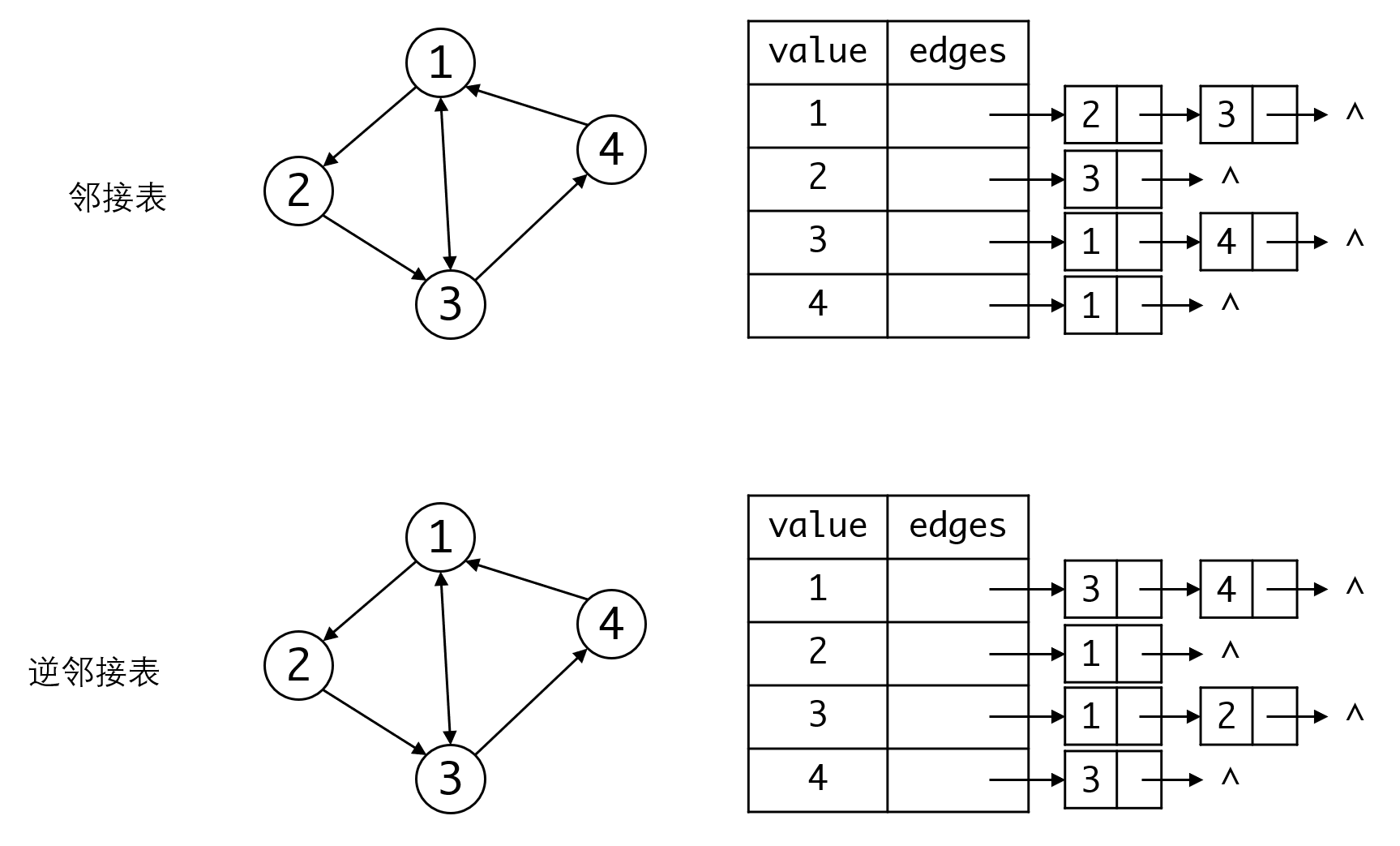
显然逆邻接表非常适合计算入度,计算出度则比较麻烦。
十字链表
既然邻接表和逆邻接表的优缺点正好互补,那么如果将两者结合起来,岂不美哉?
计算机科学家也是这么想的,这就是十字链表(Orthogonal List)。十字链表的边会记录对应的起点顶点和终点顶点,同时也要记录两个链表(同时属于两个链表)。假如某条边以顶点A起点,以B为终点。那么两个链表一个串联所有以A为起点的边,另一个串联所有以B为终点的边。同样的顶点也需要两个链表,一个是以该顶点为起点的所有边,一个是以该顶点为终点的所有边。
struct Vertex;
struct Edge{
int value;
Vertex* begin; // 边的起点顶点
Vertex* end; // 边的终点顶点
Edge* in_next; // 同起点边的链表
Edge* out_next; // 同终点边的链表
}
struct Vertex{
int value;
Edge* in; // 入边链表
Edge* out; // 出边链表
}
十字链表的表示会有点乱,请大家仔细对照。
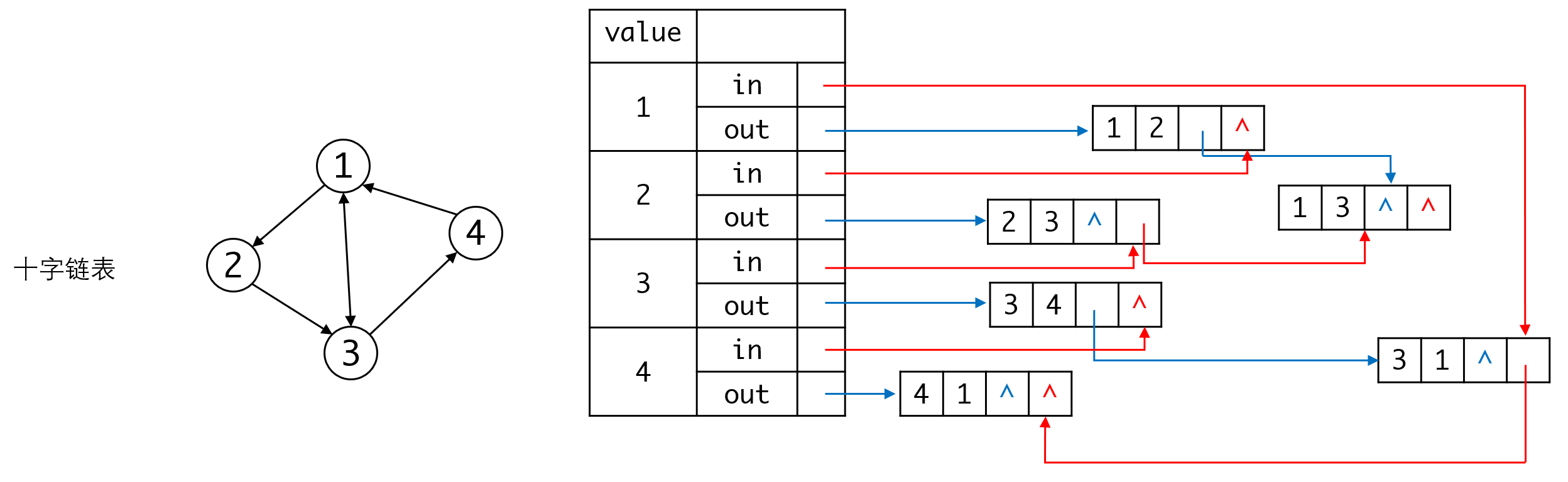
其中蓝色表示顶点的入边链表,红色表示出边链表。
十字链表这个译名其实有一定迷惑性,我们可以看出其实没有多少“十字”的感觉。Orthogonal实际应该解释成“正交”,比较形象地反应了整体结构的特点——每条边都记录了两个维度的信息。
十字链表不管求入度还是出度都很容易(复杂度是多少?)。不过跟双链表一样,空间开销更大了,整体的复杂度也增加了。
邻接多重表
对于无向图来说,邻接表也存在数据重复的问题:
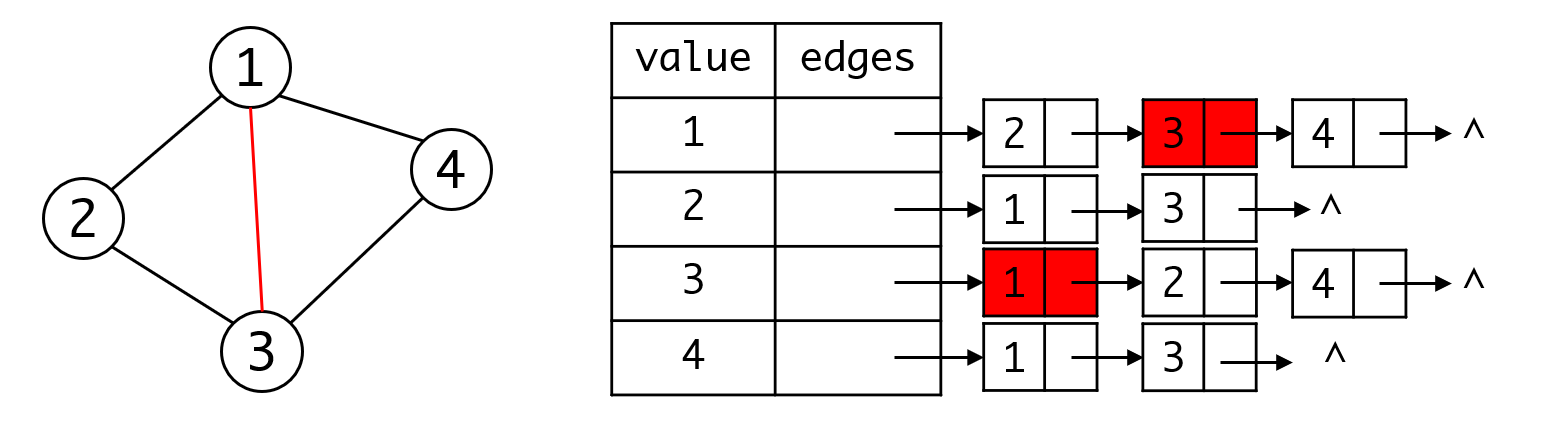
图中红色的这条线,在邻接表中实际上存在两个项,一个项是从1出发的链表,终点是3,另一个项是从3出发,终点是1。
在你处理边时,你需要将两个项目都进行处理才行。
要去掉重复的数据,方便我们处理,我们可以用邻接多重表来实现。
邻接多重表与十字链表类似,边上都要记录边对应的两个顶点。而对应的链表,则是串联与顶点有关的边:
struct Vertex;
struct Edge{
int value;
Vertex* v1;
Edge* edge1;
Vertex* v2;
Edge* edge2;
}
struct Vertex{
int value;
Edge* edges;
}
其中v1表示边的第一个顶点,链表edge1串联与v1相关的各条边。 同理v2表示边的第二个顶点,链表edge2串联与v2相关的各条边。
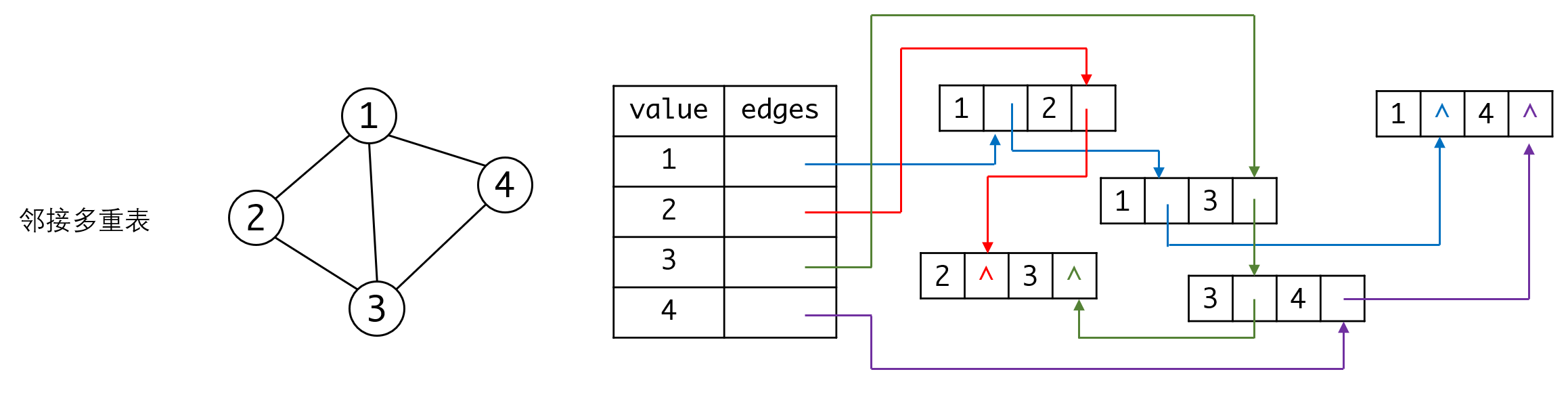
图中用不同颜色串联起不同顶点对应的边链表。从图中我们可以看出每条边只有一个边对象,操作不会再有重复项的问题。但和十字链表一样,多重链表处理的复杂度也大大提升了。